The functor front-end is the preferred front-end at the moment. It is more powerful than the standard front-end and has a more readable transition table. It also makes it easier to reuse parts of state machines. Like eUML, it also comes with a good deal of predefined actions. Actually, eUML generates a functor front-end through Boost.Typeof and Boost.Proto so both offer the same functionality.
The rows which MSM offered in the previous front-end come in different flavors. We saw the a_row, g_row, _row, row, not counting internal rows. This is already much to know, so why define new rows? These types have some disadvantages:
They are more typing and information than we would wish. This means syntactic noise and more to learn.
Function pointers are weird in C++.
The action/guard signature is limited and does not allow for more variations of parameters (source state, target state, current state machine, etc.)
It is not easy to reuse action code from a state machine to another.
We can change the definition of the simple tutorial's transition table to:
struct transition_table : mpl::vector<
// Start Event Target Action Guard
// +---------+------------+-----------+---------------------------+----------------------------+
Row < Stopped , play , Playing , start_playback , none >,
Row < Stopped , open_close , Open , open_drawer , none >,
Row < Stopped , stop , Stopped , none , none >,
// +---------+------------+-----------+---------------------------+----------------------------+
Row < Open , open_close , Empty , close_drawer , none >,
// +---------+------------+-----------+---------------------------+----------------------------+
Row < Empty , open_close , Open , open_drawer , none >,
Row < Empty , cd_detected, Stopped , store_cd_info , good_disk_format >,
g_row< Empty , cd_detected, Playing , &player_::store_cd_info , &player_::auto_start >,
// +---------+------------+-----------+---------------------------+----------------------------+
Row < Playing , stop , Stopped , stop_playback , none >,
Row < Playing , pause , Paused , pause_playback , none >,
Row < Playing , open_close , Open , stop_and_open , none >,
// +---------+------------+-----------+---------------------------+----------------------------+
Row < Paused , end_pause , Playing , resume_playback , none >,
Row < Paused , stop , Stopped , stop_playback , none >,
Row < Paused , open_close , Open , stop_and_open , none >
// +---------+------------+-----------+---------------------------+----------------------------+
> {};
Transitions are now of type "Row" with exactly 5 template arguments: source state, event, target state, action and guard. Wherever there is nothing (for example actions and guards), write "none". Actions and guards are no more methods but functors getting as arguments the detected event, the state machine, source and target state:
struct store_cd_info
{
template <class Fsm,class Evt,class SourceState,class TargetState>
void operator()(Evt const&, Fsm& fsm, SourceState&,TargetState& )
{
cout << "player::store_cd_info" << endl;
fsm.process_event(play());
}
}; The advantage of functors compared to functions are that functors are generic and reusable. They also allow passing more parameters than just events. The guard functors are the same but have an operator() returning a bool.
It is also possible to mix rows from different front-ends. To show this, a g_row has been left in the transition table. Note: in case the action functor is used in the transition table of a state machine contained inside a top-level state machine, the “fsm” parameter refers to the lowest-level state machine (referencing this action), not the top-level one.
To illustrate the reusable point, MSM comes with a whole set of predefined functors. Please refer to eUML for the full list. For example, we are now going to replace the first action by an action sequence and the guard by a more complex functor.
We decide we now want to execute two actions in the first transition (Stopped -> Playing). We only need to change the action start_playback to
ActionSequence_< mpl::vector<some_action, start_playback> >
and now will execute some_action and start_playback every time the transition is taken. ActionSequence_ is a functor calling each action of the mpl::vector in sequence.
We also want to replace good_disk_format by a condition of the type: “good_disk_format && (some_condition || some_other_condition)”. We can achieve this using And_ and Or_ functors:
And_<good_disk_format,Or_< some_condition , some_other_condition> >
It even starts looking like functional programming. MSM ships with functors for operators, state machine usage, STL algorithms or container methods.
You probably noticed that we just showed a different transition table and that we even mixed rows from different front-ends. This means that you can do this and leave the definitions for states unchanged. Most examples are doing this as it is the simplest solution. You still enjoy the simplicity of the first front-end with the extended power of the new transition types. This tutorial, adapted from the earlier example does just this.
Of course, it is also possible to define states where entry and exit actions are also provided as functors as these are generated by eUML and both front-ends are equivalent. For example, we can define a state as:
struct Empty_Entry
{
template <class Event,class Fsm,class State>
void operator()(Event const&,Fsm&,State&)
{
...
}
}; // same for Empty_Exit
struct Empty : public msm::front::euml::func_state<Empty_Entry,Empty_Exit>{};This also means that you can, like in the transition table, write entry / exit actions made of more complicated action combinations. The previous example can therefore be rewritten.
Usually, however, one will probably use the standard state definition as it provides the same capabilities as this front-end state definition, unless one needs some of the shipped predefined functors or is a fan of functional programming.
Using the basic front-end, we saw how to pass data to actions through the event, that data common to all states could be stored in the state machine, state relevant data could be stored in the state and access as template parameter in the entry / exit actions. What was however missing was the capability to access relevant state data in the transition action. This is possible with this front-end. A transition's source and target state are also given as arguments. If the current calculation's state was to be found in the transition's source state (whatever it is), we could access it:
struct send_rocket
{
template <class Fsm,class Evt,class SourceState,class TargetState>
void operator()(Evt const&, Fsm& fsm, SourceState& src,TargetState& )
{
fire_rocket(evt.direction, src.current_calculation);
}
}; It was a little awkward to generate new events inside actions with the basic front-end. With the functor front-end it is much cleaner:
struct send_rocket
{
template <class Fsm,class Evt,class SourceState,class TargetState>
void operator()(Evt const& evt, Fsm& fsm, SourceState& src,TargetState&)
{
fire_rocket(evt.direction, src.current_calculation);
fsm.process_event(rocket_launched());
}
}; Like states, state machines can be defined using the previous front-end, as the previous example showed, or with the functor front-end, which allows you to define a state machine entry and exit functions as functors, as in this example.
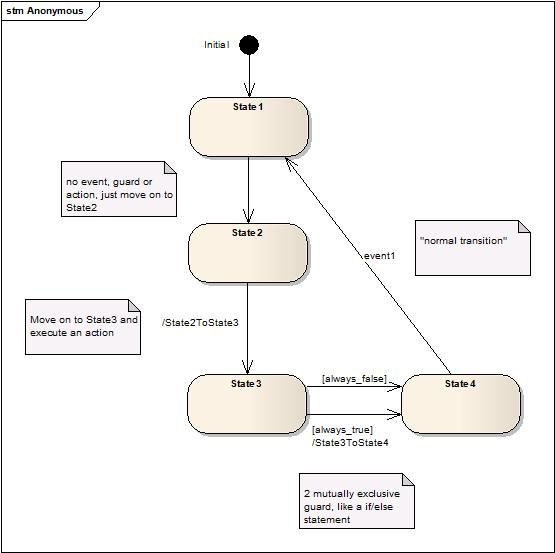
Anonymous (completion) transitions are transitions without a named event.
We saw how this front-end uses none when no action or guard is
required. We can also use none instead of an event to mark an
anonymous transition. For example, the following transition makes an
immediate transition from State1 to State2:
Row < State1 , none , State2 >
The following transition does the same but calling an action in the process:
Row < State1 , none , State2 , State1ToState2, none >
The following diagram shows an example and its implementation:
The following example uses internal transitions with the functor front-end. As for the simple standard front-end, both methods of defining internal transitions are supported:
providing a
Rowin the state machine's transition table withnoneas target state defines an internal transition.providing an
internal_transition_tablemade ofInternalrows inside a state or submachine defines UML-conform internal transitions with higher priority.transitions defined inside
internal_transition_tablerequire no source or target state as the source state is known (Internalreally areRowwithout a source or target state) .
Like for the standard front-end internal transitions, internal transition tables are added into the main state machine's table, thus allowing you to distribute the transition table definition and reuse states.
There is an added bonus offered for submachines, which can have both the standard transition_table and an internal_transition_table (which has higher priority). This makes it easier if you decide to make a full submachine from a state later. It is also slightly faster than the standard alternative, adding orthogonal regions, because event dispatching will, if accepted by the internal table, not continue to the subregions. This gives you a O(1) dispatch instead of O(number of regions). While the example is with eUML, the same is also possible with this front-end.